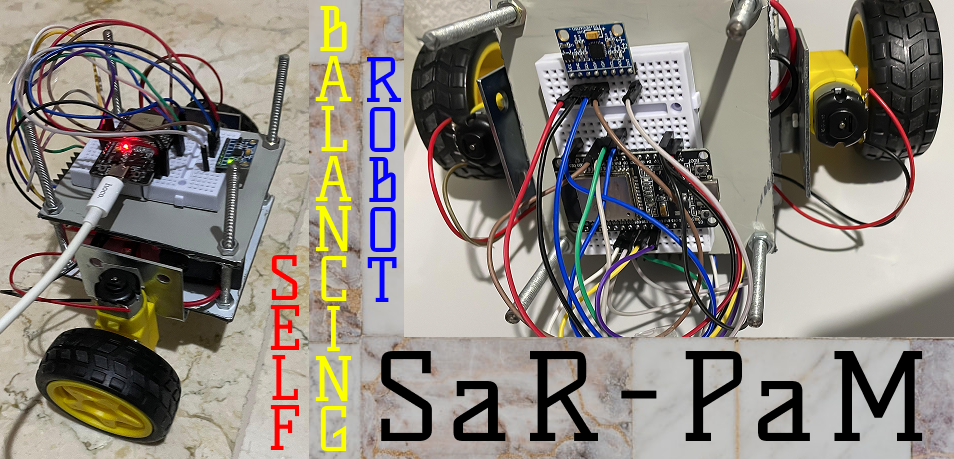
SaR-PaM Balancing Robot
SaR-PaM is a two-wheeled self-balancing robot powered by an ESP32 and MPU6050, using a PID control loop for real-time stability and a dual-core FreeRTOS architecture to isolate time-critical balancing tasks from WiFi and WebSocket communication, ensuring stable operation. The robot supports command-based path memorization, enabling user-issued movement instructions to be recorded and replayed automatically, and is controlled through a React-based web interface communicating over low-latency WebSocket, with integrated safety and power management features such as fall detection and automatic light sleep mode.
Tech Stack
ESP32C++FreeRTOSWebSocketReact
Skills Utilized
PID Control SystemsWebSocket CommunicationReal-Time Operating SystemsInter-Task Communication
 View on GitHub
View on GitHub