Horizon-Oriented Laser Output
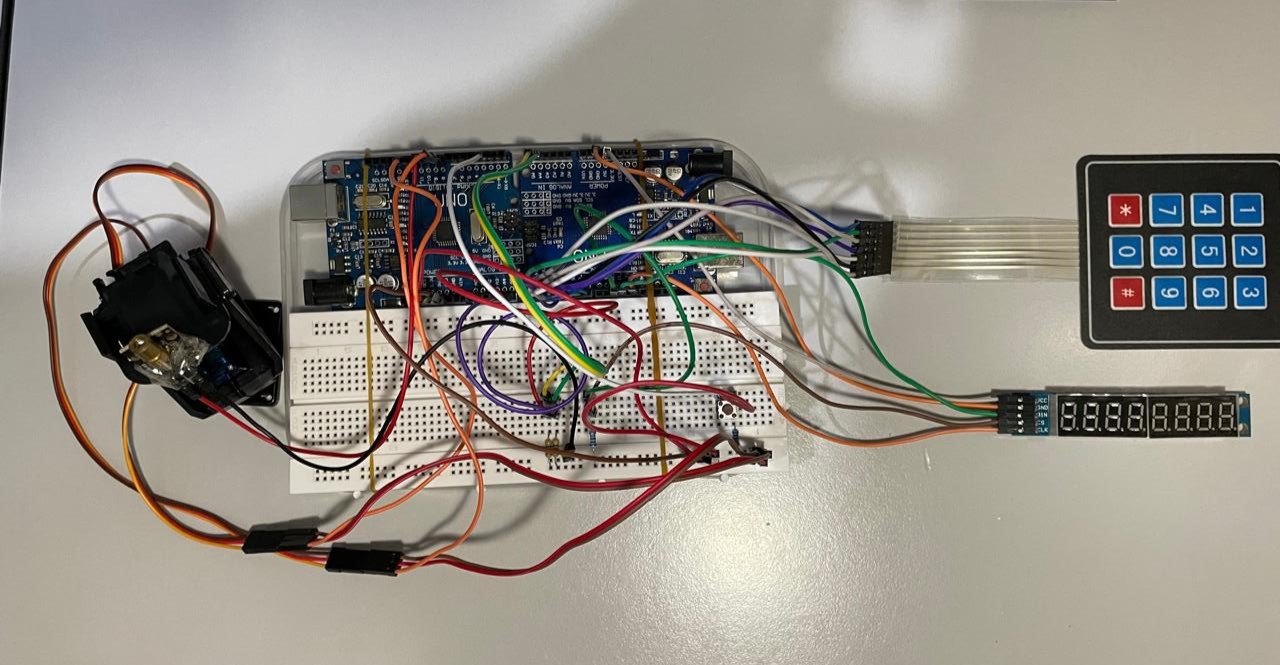
HOLO (Horizon-Oriented Laser Output) is an embedded system that automates directional pointing using azimuth and altitude coordinates. The system employs a master–slave Arduino architecture where user input is received via a keypad, displayed on a MAX7219 serial display, and transmitted through I2C communication to control dual servo motors using PWM. An interrupt-driven laser module enables real-time activation without delay. The system was validated through Proteus simulation and physical hardware implementation, achieving accurate and efficient automated pointing with minimal human intervention.
Tech Stack
PWM (Servo Control)Embedded CArduinoI2C CommunicationSPI Communication
Skills Utilized
Microcontroller ProgrammingInterrupt HandlingMaster–Slave Communication
 View on GitHub
View on GitHub